Fab Academy 2018
Final project
(What will it do?) I am going to make a bionic butterfly that can fly in a windless indoor environment and control it to turn right and left through a 2.4G wireless remote control. The reason I want to make this is a friend of my who working in a advertising company came to me and said whether I could make a mechanical butterfly like this. The conditions are very attractive: Someone will help me to develop this project together with some financial support. At the time, I was distressed about what my Final project was supposed to do. So when I heard this offer, I immediately agreed.
(What will you design?) I decided to use carbon fiber as skeleton and structure, Arduino and 2.4g module as controller and communication part. I simply drew a sketch as follows

(What processes will be used?)
(What materials and components will be used?)
(Where will come from?) All materials and components from Taobao (How much will they cost?) Totally cost around 300$ Ps: Servo about 100$ for each
Idea & Design I checked a lot of information About ornithopter on the Internet even bought a book aerodynamics of ornithopter. I found that most of the flapping wing power systems use brushless motors. Although this is a very mature program, it is mostly used in Bionic BIRD-robot projects. taht means the robot will fly like a bird, not an butterfly. In order to make it more "bionic", I decided to give up this easy-to-implement power system of brushless motors and try to make it by two servos as the driving force. That will make my robot look more like a real butterfly when flying.





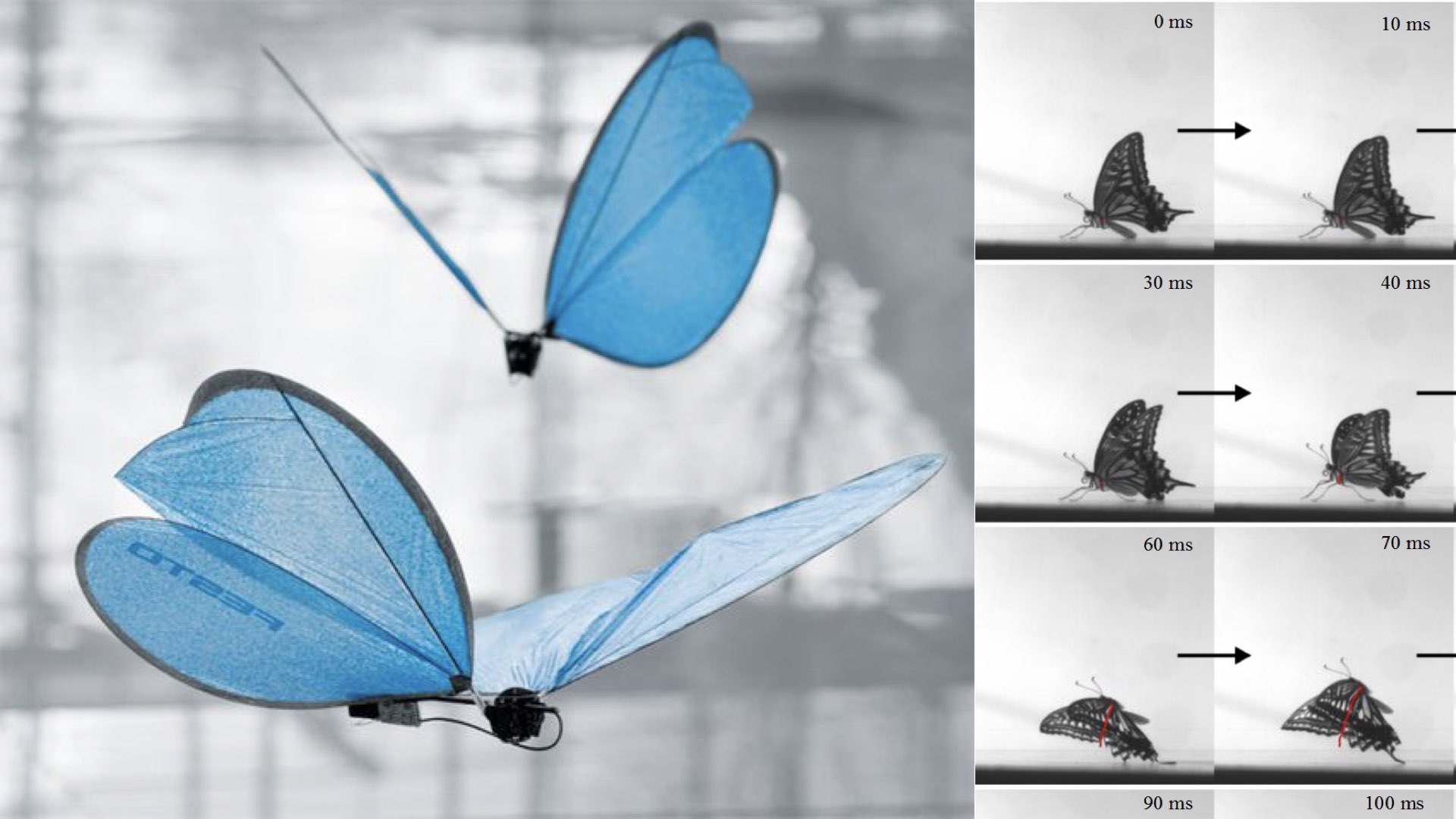
(Who's done what beforehand?) Here are some reference I found and thanks so much for helping me on this project:





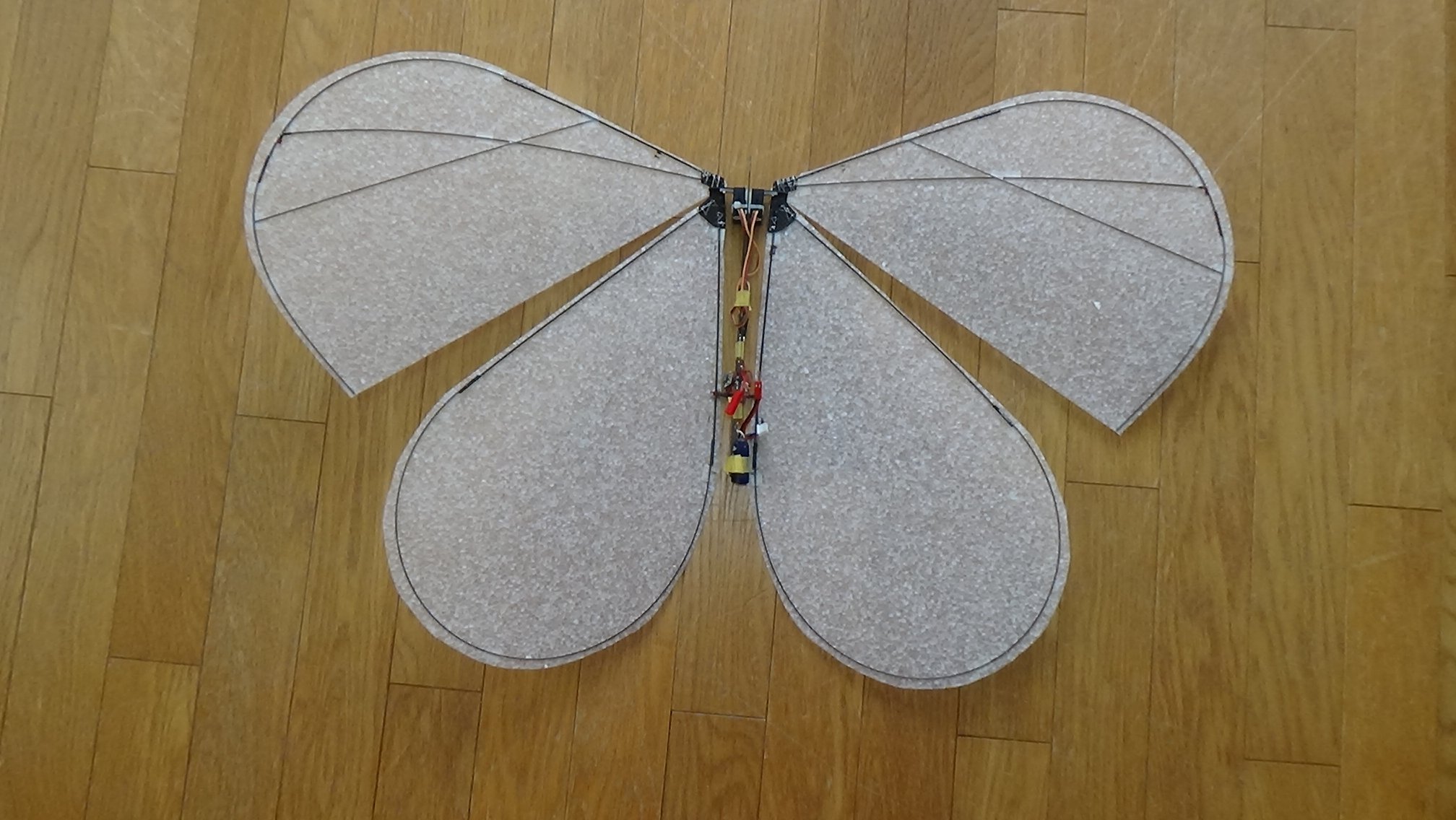



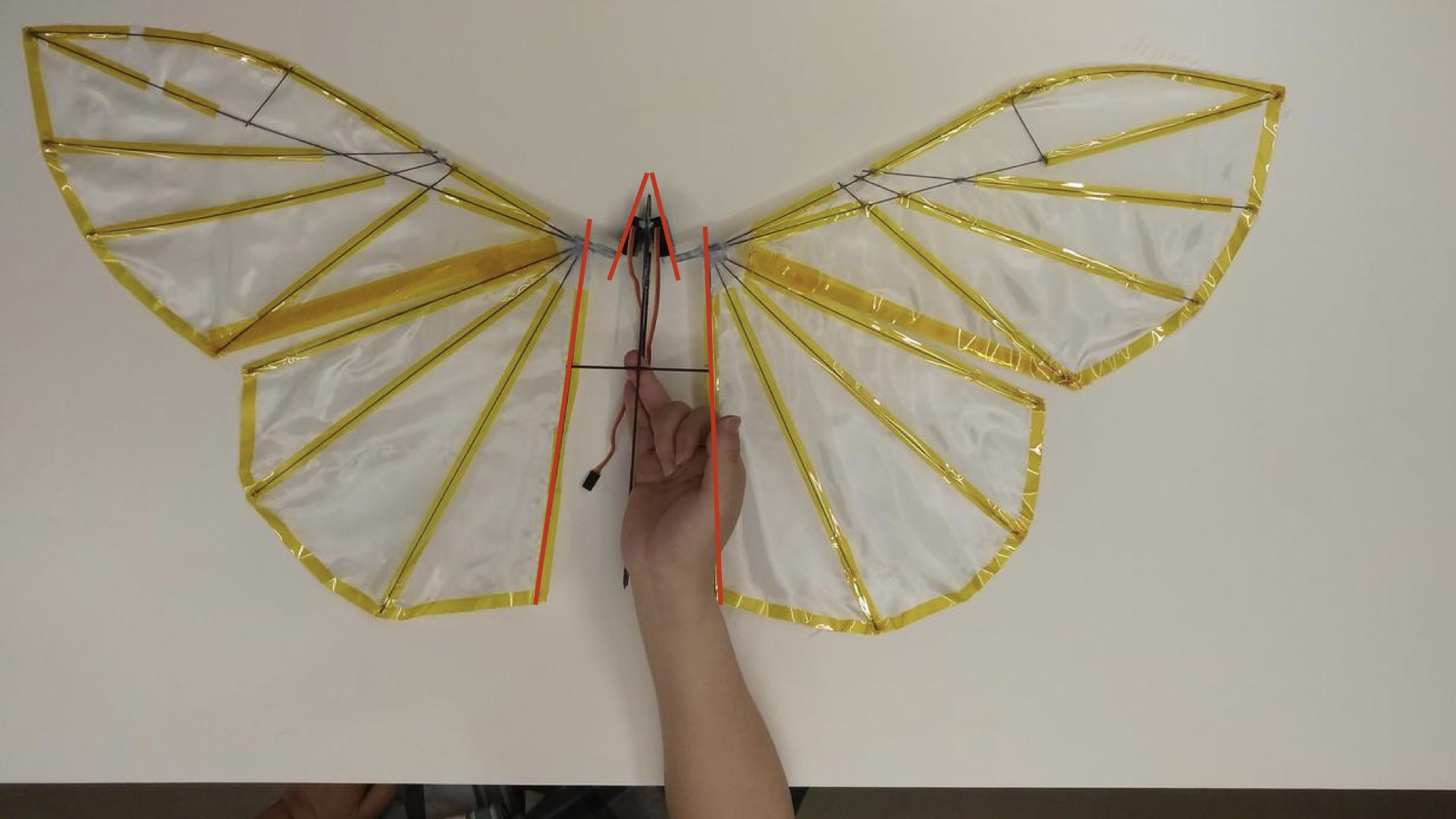
2.1 Making wings








background The few successful cases of using a servo as a power engine add uncertainties to our work. So I continued to check the relevant infrom and found that the books I bought contained mathematical principles for the description of birds and ornithopter, as well as a formula describing the functional relationship between power and wing surface area. Meanwhile,I saw that Kazuhiko also tested the same servo and the flight of different surface area wings in his own channel to record the ratio of pull ratio.





My Idea So I suddenly thought: Is it possible to use what software to simulate the flying process of a butterfly robot? My idea is to build a model based on the specific parameters of the servo and build several wing models of different sizes. After assembly, place them in a simulated gravity field. I searched for some software that simulated the flight status of the aircraft. I guess there must be a mature off-the-shelf app to do this job. So I made a statement in the "Wechat moment" and asked if there is any software suitable for such simulation. Here are some reference results:




The KST-MS320 servos arrived and we are planning to have a test. Although the Technical Specification point out that: