changes:
Board:
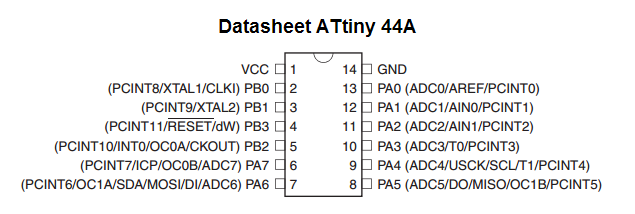
im using Echo ftdi board designed in week-6 .. in the design i flipped the pins (tx , rx) as i needed to connect the traces without jumpers so here, the first thing i would do is to change the code of sending pin (tx) with the recieving pin (rx)
in the code its defined as preprocessor:
//#define serial_pin_in (1 << PA0)
//#define serial_pin_out (1 << PA1)
#define serial_pin_in (1 << PA1)
#define serial_pin_out (1 << PA0)
new line:
im sending now with the CR+LF for windows new line compatible
buffer storage:
the other problem can be seen in previous video in week 6 i’ve edited the buffer storage functionality… where now i check that i dont go above the array size and to reset when ENTER is sent. (probably the code was intended to do somthing else??)
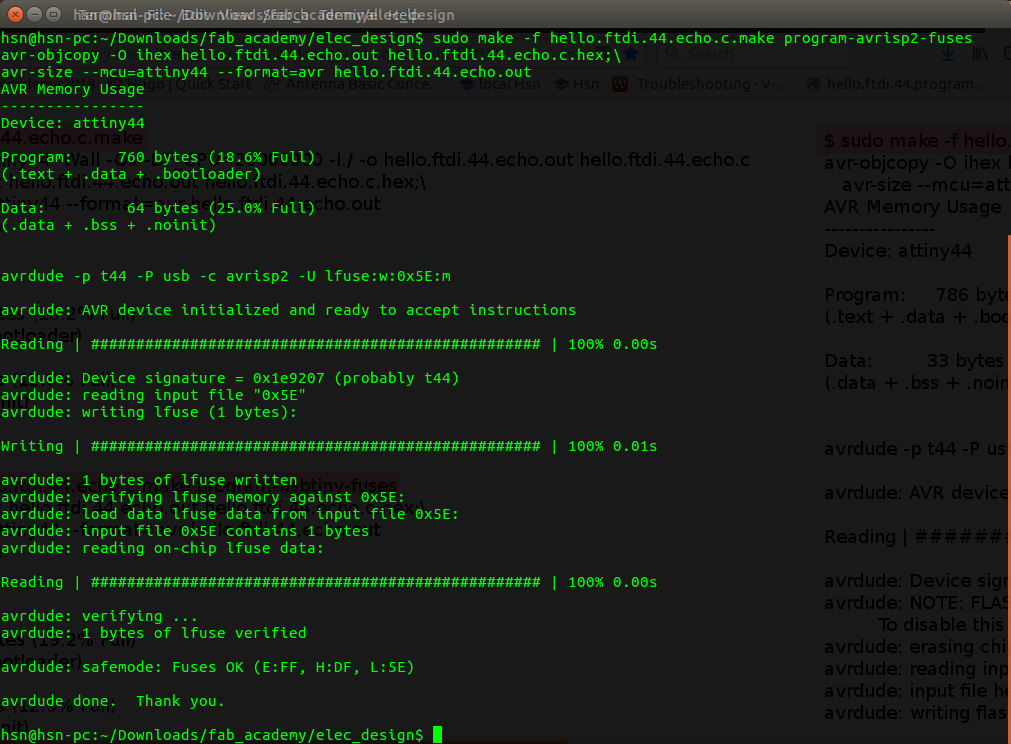
UPLOAD:
CODE:
//
//
// hello.ftdi.44.echo.interrupt.c
//
// 115200 baud FTDI character echo, interrupt version
//
// set lfuse to 0x5E for 20 MHz xtal
//
// Neil Gershenfeld
// 12/8/10
//
// (c) Massachusetts Institute of Technology 2010
// This work may be reproduced, modified, distributed,
// performed, and displayed for any purpose. Copyright is
// retained and must be preserved. The work is provided
// as is; no warranty is provided, and users accept all
// liability.
//
#include <avr/io.h>
#include <util/delay.h >
#include <avr/interrupt.h >
#include <avr/pgmspace.h >
#define output(directions,pin) (directions |= pin) // set port direction for output
#define set(port,pin) (port |= pin) // set port pin
#define clear(port,pin) (port &= (~pin)) // clear port pin
#define pin_test(pins,pin) (pins & pin) // test for port pin
#define bit_test(byte,bit) (byte & (1 << bit)) // test for bit set
#define bit_delay_time 8.5 // bit delay for 115200 with overhead
#define bit_delay() _delay_us(bit_delay_time) // RS232 bit delay
#define half_bit_delay() _delay_us(bit_delay_time/2) // RS232 half bit delay
#define char_delay() _delay_ms(10) // char delay
#define serial_port PORTA
#define serial_direction DDRA
#define serial_pins PINA
//#define serial_pin_in (1 << PA0)
//#define serial_pin_out (1 << PA1)
#define serial_pin_in (1 << PA1)
#define serial_pin_out (1 << PA0)
#define serial_interrupt (1 << PCIE0)
//#define serial_interrupt_pin (1 << PCINT0)
#define serial_interrupt_pin (1 << PCINT1)
#define max_buffer 25
void get_char(volatile unsigned char *pins, unsigned char pin, char *rxbyte) {
//
// read character into rxbyte on pins pin
// assumes line driver (inverts bits)
//
*rxbyte = 0;
while (pin_test(*pins,pin))
//
// wait for start bit
//
;
//
// delay to middle of first data bit
//
half_bit_delay();
bit_delay();
//
// unrolled loop to read data bits
//
if pin_test(*pins,pin)
*rxbyte |= (1 << 0);
else
*rxbyte |= (0 << 0);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 1);
else
*rxbyte |= (0 << 1);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 2);
else
*rxbyte |= (0 << 2);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 3);
else
*rxbyte |= (0 << 3);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 4);
else
*rxbyte |= (0 << 4);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 5);
else
*rxbyte |= (0 << 5);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 6);
else
*rxbyte |= (0 << 6);
bit_delay();
if pin_test(*pins,pin)
*rxbyte |= (1 << 7);
else
*rxbyte |= (0 << 7);
//
// wait for stop bit
//
bit_delay();
half_bit_delay();
}
void put_char(volatile unsigned char *port, unsigned char pin, char txchar) {
//
// send character in txchar on port pin
// assumes line driver (inverts bits)
//
// start bit
//
clear(*port,pin);
bit_delay();
//
// unrolled loop to write data bits
//
if bit_test(txchar,0)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,1)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,2)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,3)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,4)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,5)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,6)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,7)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
//
// stop bit
//
set(*port,pin);
bit_delay();
}
void put_string(volatile unsigned char *port, unsigned char pin, char *str) {
//
// print a null-terminated string
//
int index1;
index1 = 0;
do {
put_char(port, pin, str[index1]);
++index1;
} while (str[index1] != 0);
}
ISR(PCINT0_vect) {
//
// pin change interrupt handler
//
char chr;
static char buffer[max_buffer];
static int index;
get_char(&serial_pins, serial_pin_in, &chr);
put_string(&serial_port, serial_pin_out, "interrupt: \"");
if (chr != 10 && chr != 13)
buffer[index++] = chr;
if (index == (max_buffer-1))
index = 0;
put_string(&serial_port, serial_pin_out, buffer);
//if (chr != 10 && chr != 13)
//put_char(&serial_port, serial_pin_out, chr);
put_char(&serial_port, serial_pin_out, '\"');
put_char(&serial_port, serial_pin_out, 10); // Carriage Return
put_char(&serial_port, serial_pin_out, 13); // line feed for putty and windows
}
int main(void) {
//
// main
//
// set clock divider to /1
//
CLKPR = (1 << CLKPCE);
CLKPR = (0 << CLKPS3) | (0 << CLKPS2) | (0 << CLKPS1) | (0 << CLKPS0);
//
// initialize output pins
//
set(serial_port, serial_pin_out);
output(serial_direction, serial_pin_out);
//
// set up pin change interrupt on input pin
//
set(GIMSK, serial_interrupt);
set (PCMSK0, serial_interrupt_pin);
sei();
//
// main loop
//
while (1) {
//
// wait for interrupt
//
;
}
}