I’ve been very unsure about what my final project will be.
I didn’t start FabAcademy with something specific in mind and anything that I was thinking about didn’t involve electronics or programming so I had to come up with something from scratch.
I knew I was interested in doing something either with origami, or popups, mainly something that involved tridimensional movement. As the course progressed I started to feel a pull towards interactive installations and such, so now I’ve decided to make an interactive retractable tessellation installation.
The hope is to make some kind of modular “wall” or dome of some kind, something immersive that would react as people get closer.
The actual panels I’m envisioning don’t look like this, but the principle is exactly the same, even as the shape would change.
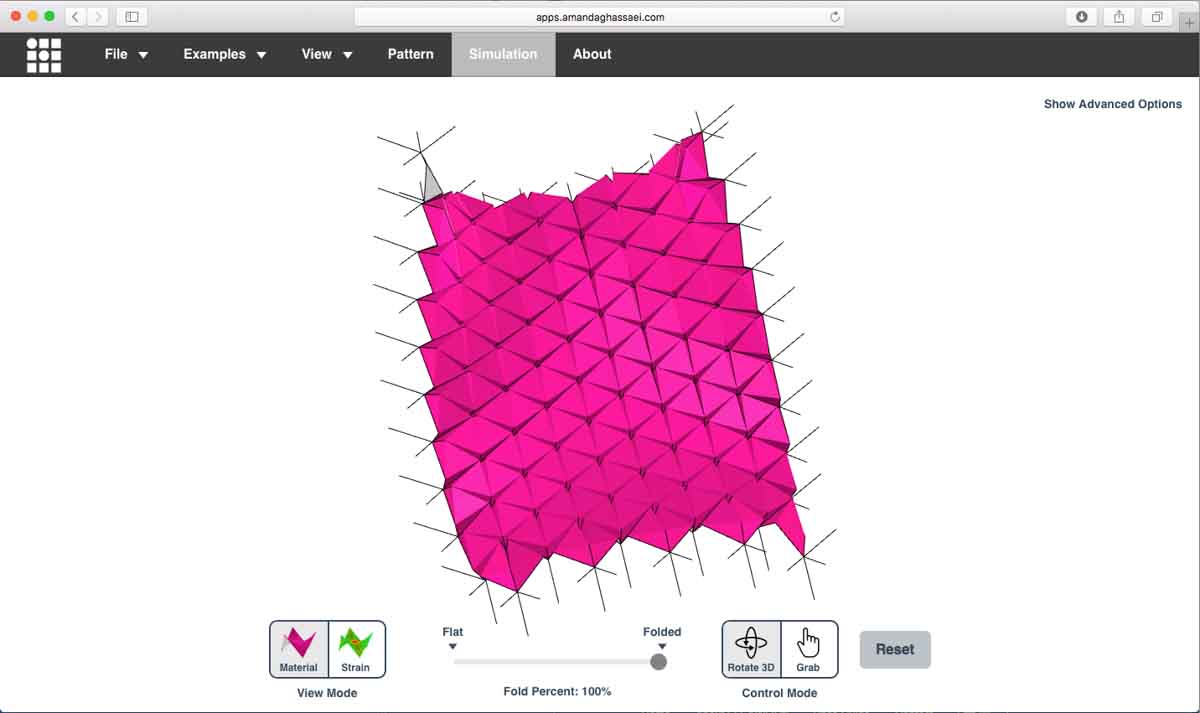
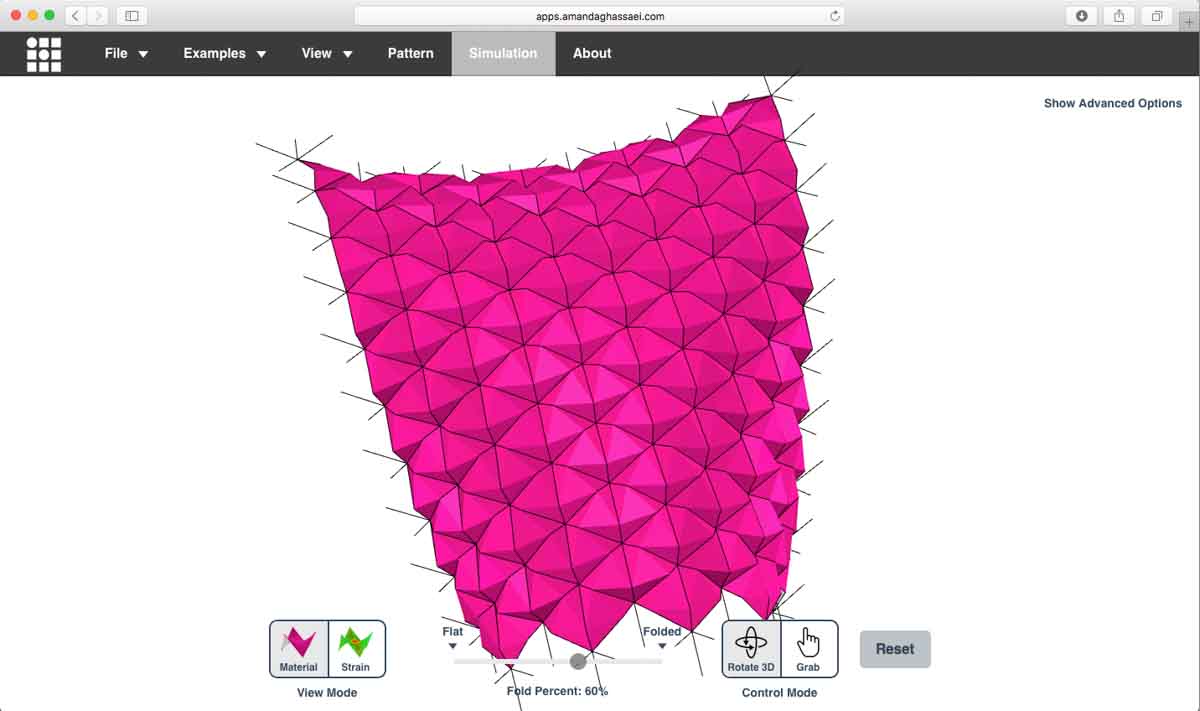
I’ve used Amanda Ghassaei’s origami simulator . to give an idea of what it should look like and the results were amazing. It really is a great simulator and some impressive coding.
The 60 percent fold is a good representation of the maximum aperture I’ll be looking for, so that the folds will be able to go back to their original place. I imagine the starting point completely folded, or contracted, and as the sensor picks up an object is getting closer, the leds would light up softly and grow stronger as it gets closer and the folds in the tessellation open up the same way.
I suppose what I’m imagining, movement wise, is very much like this project:
This isn’t really the materials or even the scale I have in mind, but it gives a very lively image of what I hope will happen when either the motors, rubber bands or flexinol wire/springs, will make, once I figure out the movement bit.
And in a dream world, haha, something with such organic movement and interaction capabilities as this:
I know these things cost much more than what I actually have available at the FabLab but I’m allowed to dream and use ridiculously amazing references.
Now, I’m unsure if I’ll be using the sonar distance sensor or the IR sensors that are suggested on the video.
I’m leaning towards the later because the sonar sensor goes a little crazy when it’s in analog and the object that it’s sensing isn’t flat and approaching in a parallel position to it. Since what I want is for the leds to light up faintly and then glow stronger as the persons/hand approaches it, then it need it to be able to not only sense that distance in degrees but to do it with a certain stability so that the lights don’t fluctuate from soft to harshly lit because the sensor is getting a strange reading. In addition to that, I’d like to be able to put this as an installation in a barely lit room so the IR make sense because you won’t be able to tell the panels are there until they come alive.
In addition to that, and I’m sure Neil will say this is another final project, but I’m hoping to be able to do both, I want to make the tessellated panels react to the distance of the people with movement too.
I saw Jie Qi’s origami crane project origami crane project and thought I could use the same Flexinol® Actuator Wire to make the tesselation retract and expand.
It would use the same sensors the panels use to light up the leds, but it would use the reading to send less current through the flexinol the closer you get to it. That is to say, that it would start in a contracted position (current going through it) on the maximum end of the analog spectrum (which I believe is 1023) and as the sensor picks up the person coming closer and closer it would send less and less current so that it looks almost as if the tessellated panel is also reaching for the person.
I’m uncertain if all this will be accomplished but I’m hoping it can be. I think it would be an amazing thing to see.
I’m also worried about the materials of the tesselation, and if the Flexinol will be strong enough to overcome the resistance of cardboard, for instance. The material will have to be strong enough to carry the weight of the LEDs and the soft circuits (which it should) but I’m not entirely certain it’ll then be able to contract it properly too.
The alternative might be to think about a rubber band mechanism of some sort that is controlled by a small motor, so that the material won’t be an impediment. I also want the modules to be structurally sound, so it’s important that it doesn’t simply fall from the weight.
Or perhaps even build a mechanism not unlike this one:
...
Today I found something that is almost exactly what I'm hoping to make. The only real difference is the actuall tesselation, the missing leds and that I don't want any actual contact with the surface, but rather a proximity sensitive display.
Again, I'm still trying to work out the actual mechanincs of how I'm going to make it move.