08. Embedded Programming
Class Week 08
Lesson08 embedded programming
Review07 computer-controlled machining
Recitation08 human fab lab
Note: To view Neil's screen in your computer -> http://screen.academany.org/
Assignment Week 08
-
group assignment:
- Compare the performance and development workflows for other architectures.
-
individual assignment:
- Read a microcontroller data sheet. Program your board to do something, with as many different programming languages and programming environments as possible.
Learning outcome
- Identify relevant information in a microcontroller data sheet.
- Implement programming protocols.
Student should have
- Documented what you learned from reading a microcontroller datasheet.
- What questions do you have? What would you like to learn more about?
- Programmed your board.
- Described the programming process/es you used.
- Included your code.
References and resources
AVR, C and Arduino
This is a copy of the Guillem class notes. You can find the latest version here
Our chip today: ATtiny44

- Small: 14 pins
- Cheap: ~0.5€
- Same family as most Arduino chips, AVR manufactured by Microchip formerly Atmel.
- The Arduino UNO uses the bigger ATMega range, mostly the ATMEGA328P.

The Arduino abstraction

void setup() {
pinMode(6, OUTPUT);
}
void loop() {
digitalWrite(6, HIGH);
delay(1000);
digitalWrite(6, LOW);
delay(1000);
}
:::success :rocket: Follow the instructions to use Arduino with the ATtiny family. :::
:::info
How does Arduino turns this in to real AVR C?

Learn more :::
The "real" thing
:eyes: Let's look at the datasheet ATtinyX4 Datasheet

Memory

Registers


:::info What a byte is?
| Lenght | Name | Example |
|---|---|---|
| 1 | Bit | 0 |
| 8 | Byte | 10110101 |
Let's think on them as collection of 8 switches:
 :::
Addressing registers
- DDRx register: Configures pins as input or output Do we want the pin for a button or an led? (1=OUTPUT and 0=INPUT)
- PORTx register: Read data from pins Is the button pressed or not? (1=HIGH and 0=LOW)
- PINx register: Write data to pins Turn on or off the led. (1=HIGH and 0=LOW, on INPUT pins 1=PULLUP)


| Name | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
|---|---|---|---|---|---|---|---|---|
| 0b | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| PORTA | PORTA7 | PORTA6 | PORTA5 | PORTA4 | PORTA3 | PORTA2 | PORTA1 | PORTA0 |
| PDDRA | DDRA7 | DDRA6 | DDRA5 | DDRA4 | DDRA3 | DDRA2 | DDRA1 | DDRA0 |
| PINA | PINA7 | PINA6 | PINA5 | PINA4 | INTA3 | PINA2 | PINA1 | PINA0 |
Test this with your Arduino IDE as before:
void setup() {
DDRA = 0b01000000;
}
void loop() {
PORTA = 0b01000000;
delay(1000);
PORTA = 0b00000000;
delay(1000);
}
Now, let's do the examples using plain AVR C as on the FabAcademy examples:
:::success :rocket: To test the following examples in plain AVR C without Arduino download the template here with the make file included :::
#include <avr/io.h>
#include <util/delay.h>
int main(void) {
DDRA = 0b01000000;
while (1) {
PORTA = 0b01000000;
_delay_ms(1000);
PORTA = 0b00000000;
_delay_ms(1000);
}
}
Bits manipulation
Bit manipulation is the act of algorithmically manipulating bits or other pieces of data shorter than a word. In digital computer programming, a bitwise operation operates on one or more bit patterns or binary numerals at the level of their individual bits. Wikipedia
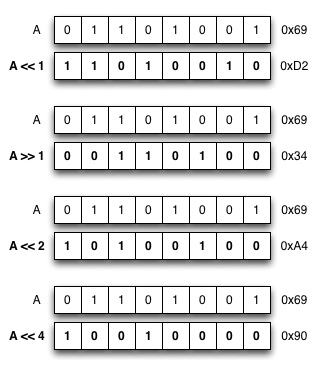
Bit Shifting
1<<1 = 0b00000001
1<<2 = 0b00000010
1<<3 = 0b00000100
...
1<<6 = 0b01000000
 4
4
Bit Masking
PORTA = 0b00000000;
OR operation:
0b01000000 <= (1<<6)
0b00000000 <= PORTA
--------------------
0b01000000 <= PORTA
PORTA = 0b01000000;
PORTA = (1 << 6) | PORTA
#include <avr/io.h>
#include <util/delay.h>
int main(void) {
DDRA = (1 << 6) | DDRA;
while (1) {
PORTA = (1 << 6) | PORTA;
_delay_ms(1000);
PORTA = ~(1 << 6) & PORTA;
_delay_ms(1000);
}
}
Macros
In the C preprocessor a macro is a fragment of code which has been given a name. Whenever the name is used, it is replaced by the contents of the macro.
#define rocketscience 6
digitalWrite(rocketscience, HIGH);
Is the same as this:
digitalWrite(6, HIGH);
Let's turn our bit masks in to macros:
#include <avr/io.h>
#include <util/delay.h>
#define pinOutput(port, pin) ((1 << pin) | port)
#define digitalWriteHigh(port, pin) ((1 << pin) | port)
#define digitalWriteLow(port, pin) (~(1 << pin) & port)
int main(void) {
pinOutput(DDRA, 6)
while (1) {
digitalWriteHigh(PORTA, 6)
_delay_ms(1000);
digitalWriteLow(PORTA, 6)
_delay_ms(1000);
}
}
Let's turn our Macros in to Neil's style macros. First just the functions:
#include <avr/io.h>
#include <util/delay.h>
#define output(directions,pin) (directions |= pin)
#define set(port,pin) (port |= pin)
#define clear(port,pin) (port &= (~pin))
int main(void) {
output(DDRA, 1 << PA6)
while (1) {
set(PORTA, 1 << PA6)
_delay_ms(1000);
clear(PORTA, 1 << PA6);
_delay_ms(1000);
}
}
And then the pins names also:
#include <avr/io.h>
#include <util/delay.h>
#define output(directions,pin) (directions |= pin)
#define set(port,pin) (port |= pin)
#define clear(port,pin) (port &= (~pin))
#define output_port PORTA
#define output_direction DDRA
#define output_pin (1 << PA6)
int main(void) {
output(output_direction, output_pin)
while (1) {
set(output_port, output_pin)
_delay_ms(1000);
clear(output_port, output_pin);
_delay_ms(1000);
}
}
:::info Are you telling me the Arduino is doing all this things for me? Yes, check the source code
:::
Toolchain

:::info How to install? For Linux and Mac
Linux $ sudo apt-get install gcc-avr binutils-avr avr-libc avrdude
Mac $ brew tap osx-cross/avr $ brew install avr-gcc avrdude --with-usb
:::
Compiler
GCC, the GNU Compiler Collection, turns your C and C++ code in to machine instructions your microcontroller can use. It's fully Open Source is somehow the father of Linux and the Open Source movement.
- Compile the code: avr-gcc
$ avr-gcc -mmcu=attiny44 -Wall -Os -DF_CPU=1000000 -I./ -o hello.blink.44.out hello.blink.44.c
- Convert the code: avr-avr-objcopy
$ avr-objcopy -O ihex hello.blink.44.out hello.blink.44.hex
- Check the size of the code: avr-size
$ avr-size --mcu=1000000 --format=avr hello.blink.44.out
Programmer software and hardware
- Upload the code using your fabISP / tinyISP
$ avrdude -p t44 -P usb -c usbtiny -U flash:w:hello.blink.44.hex

Fuses
Fuses are configuration parameters, or like the chip's BIOS. They control things like which oscillator to use, and what speed to run at (ie. the internal 8MHz oscillator, or an external crystal), brownout detection, and the size of the boot flash.
For example, you added a 20Mhz external crystal to your microcontroller PCB. In this case we will need to set the fuses for exteternal clock at 20 Mhz.
There are 3 bytes of permanent storage in the chip called fuse low byte, fuse high byte and fuse extended byte. These bytes are called fuses and can be reprogrammed as many times as you want and determines the behaviour of the chip. To do that, their value is not erased when the chip is powered off or reprogrammed.
We can set the fuses using avrdude as on the exemple below where -U hfuse:w:0xDF:m refears to the high byte and -U lfuse:w:0xFF:m to the low byte.
$ avrdude -c usbtiny -p attiny44 -U hfuse:w:0xDF:m -U lfuse:w:0xFF:m
:::info How do I know the values of the fuses?
All the information about the fuses is on the microcontroller datasheet (see: 21.2 Fuse Bytes, pg. 142). However we have tools to make our live easier as the Fuses generator
On the Arduino IDE when we set the Clock Speed parameter under the Tools menu, the software will internally update the fuses when we upload the code. :::
Make files
When you need to deal with multiple configurations and commands when compiling a software, you can use the make command on Linux/Max for automatizing this task.
:::info
$ make reads automatically a Makefile file in the folder where you launch it (it should be the folder where your project can be found). Otherwise, you can specify it with $ make -f filename, especially if you have more Makefiles with different names.
:::
Read more on Fab Academy and Make Files
Example Makefile
PROJECT=hello.blink.44
SOURCES=$(PROJECT).c
MMCU=attiny44
MMCU_PROG=t44
F_CPU=1000000
CFLAGS=-mmcu=$(MMCU) -Wall -Os -DF_CPU=$(F_CPU)
$(PROJECT).hex: $(PROJECT).out
avr-objcopy -O ihex $(PROJECT).out $(PROJECT).c.hex;\
avr-size --mcu=$(MMCU) --format=avr $(PROJECT).out
$(PROJECT).out: $(SOURCES)
avr-gcc $(CFLAGS) -I./ -o $(PROJECT).out $(SOURCES)
program-bsd: $(PROJECT).hex
avrdude -p $(MMCU_PROG) -c bsd -U flash:w:$(PROJECT).c.hex
program-dasa: $(PROJECT).hex
avrdude -p $(MMCU_PROG) -P /dev/ttyUSB0 -c dasa -U flash:w:$(PROJECT).c.hex
program-avrisp2: $(PROJECT).hex
avrdude -p $(MMCU_PROG) -P usb -c avrisp2 -U flash:w:$(PROJECT).c.hex
program-usbtiny: $(PROJECT).hex
avrdude -p $(MMCU_PROG) -P usb -c usbtiny -U flash:w:$(PROJECT).c.hex
program-dragon: $(PROJECT).hex
avrdude -p $(MMCU_PROG) -P usb -c dragon_isp -U flash:w:$(PROJECT).c.hex
Download the test code here