Question 1 - What does it do???
The Astromech E1-R1 is a robot that move straight until the ultrasonic sensor detects obstacle then it will rotate by away by having the wheels rotating at different directions (one of the wheel turning clockwise and the other turning anti-clockwise). If the ultrasonic sensor does not detect anything, it continue moving forward.
Question 2 - Who's done what beforehand???
There is a student who have done a smaller version of the Astromech, R2-D2.
Question 3 - What did you design???
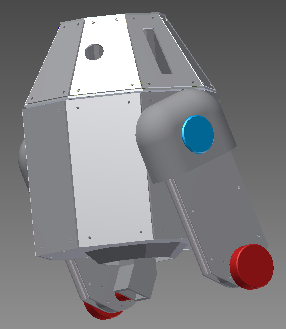
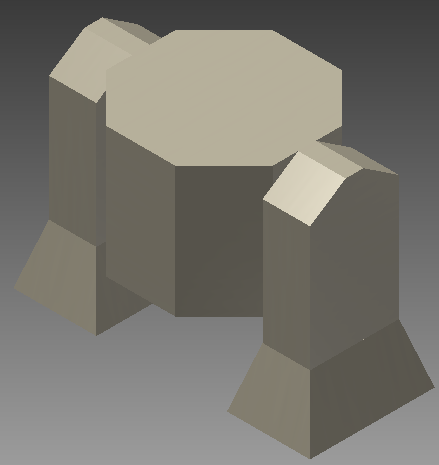
I designed the body of the E1-R1 and my buddy, Roy designed the head of the E1-R1. The below design was the actual design sample that I first came out before I started building it.
Question 4 - What materials and components were used???
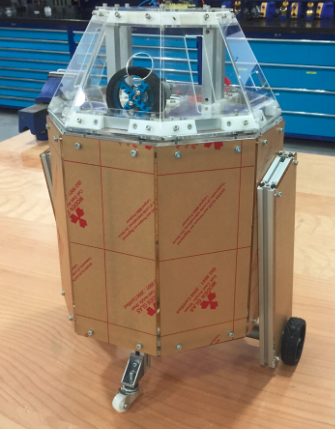
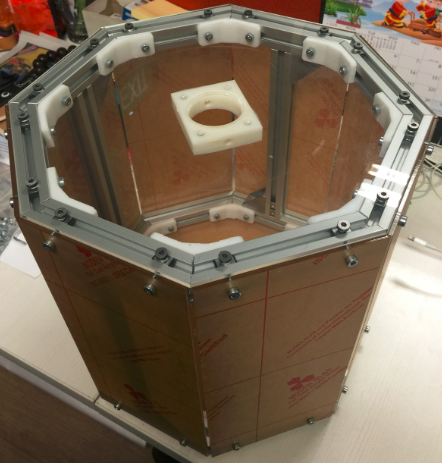
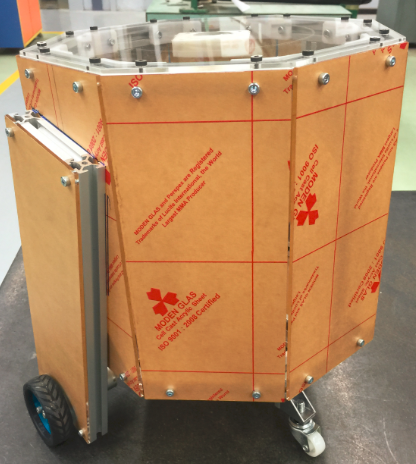
I used aluminium profiles and acrylic sheets for my body of the E1-R1. The moving parts I am using an ultrasonic sensor through the help of the customised dual h-bridge board to control the two dc motor for moving the robot.

Question 5 - Where did they come from???
The aluminium profiles is purchased from supplier, the acrylic sheets are taken from the workshop that I worked in.
The raw PCB that I built from LPKF was aquired from our instructor, Steven who will purchase it online, the ultrasonic sensor was provided by our school and dc motors are provided by our school too.
Question 6 - How much did they cost???
The whole project spent less than 200 Singapore dollars. Most of the parts are provided by our school.
Click here to view Bill of Materials for Final Project (BOM)
Question 7 - What parts and systems were made???
The whole body structure and the customised dual H-bridge board is done by myself.

Question 8 - What processes were used???
For the body structure, I used conventional machining and laser cutter. For the dual H-bridge, I used the LPKF to cut out the board.
Question 9 - What questions were answered???
I was quite satisfied with all the answers except still hve doubts with programming. Programming is something now that interests me a lot.
Question 10 - How was it evaluated???
I think currently the evaluation for the project is fairly good but I think there can be more improvements to do. I managed to program the robot to move forward and reverse as well as to turn clockwise and anti-clockwise which is quite a success. After that adding the ultra-sonic sensor to test whether it is able to detect and it seems like working fine.
E1-R1 is programmed to move forward when obstacle is detected through the ultra-sonic sensor, it will turn clockwise until there is no obstacle and continue moving forward. Everything is going accordingly to what I planned.
Question 11 - What are the implications???
The implications for the project is to further improve on the movements of the robot and maybe to make some add-on functions. There are some functions that I might be trying later on if I have the time. I would like to do a remote control to control the robot. This will make the robot more interesting rather than just letting it move by itself.