Interactive “Bris Soleil”
Work In Progress:


http://en.wikipedia.org/wiki/Brise_soleil
Reference:
Evolución del Brise Soleil en la obra de Le Corbusier
http://www.sostenibilidadyarquitectura.com/index.php/proyectos/26-referencias-significativas/34-evolucion-del-brise-soleil-en-la-obra-de-le-corbusier
Inspirations:
http://www.hoberman.com/news.html

HelioTrace receives 2010 R+D Awards citation
http://www.architectmagazine.com/building-envelope/2010-rd-awards-heliotrace-facade-system.aspx
http://www.hoberman.com/portfolio/heliotrace.php?projectname=HelioTrace
http://www.hoberman.com/abi.html
http://www.adaptivebuildings.com/
Focus:
Designing a new generation of buildings that optimize their configuration in real time by responding to environmental changes.
Sketch 01
Diagram: by Juan Ranera


Images of the Model in Grasshopper





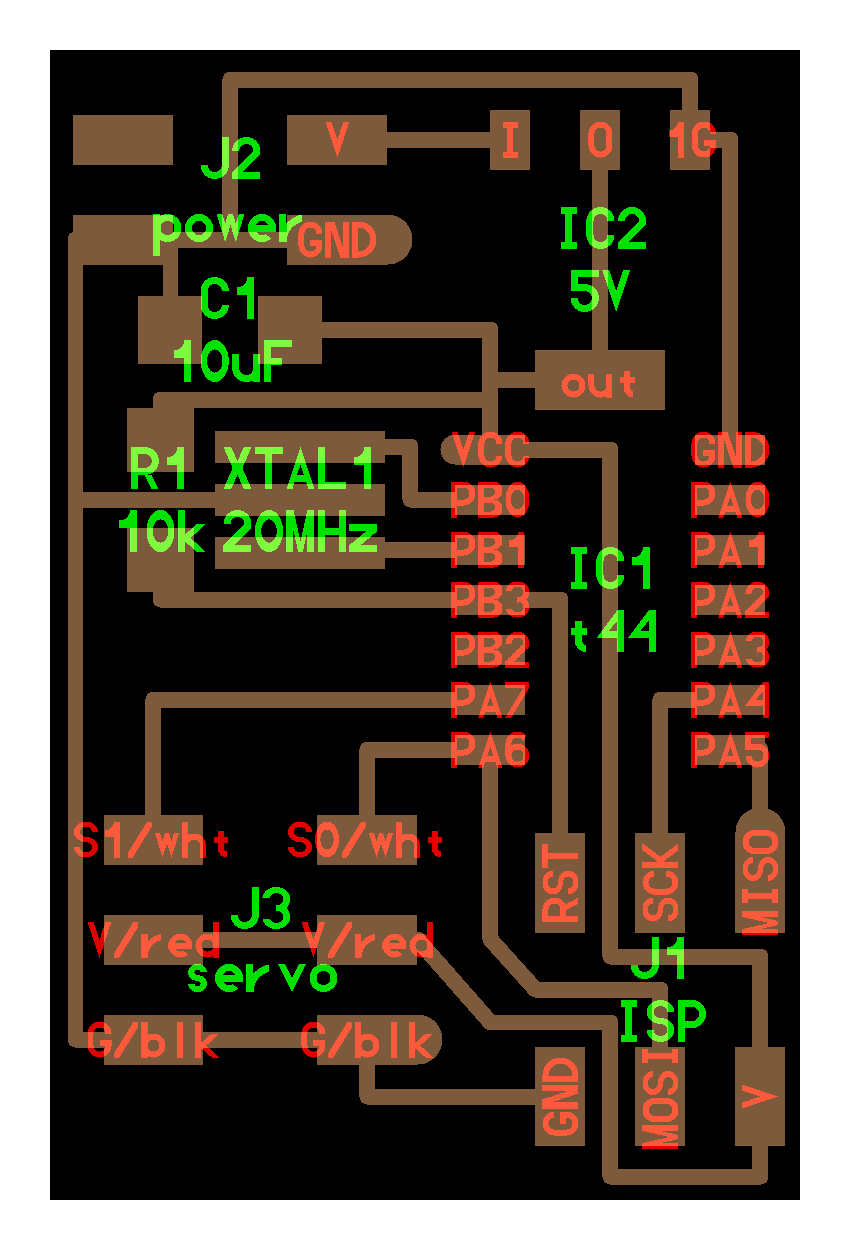
Components:
1-poleas http://www.mcmaster.com/#pulleys/=mlkib1
http://www.mcmaster.com/#pulleys/=mmupwa
2-mediante correas de plástico http://www.mcmaster.com/#timing-belts/=mlkjhr
3-motor unipolar. paso a paso o stepper http://www.cursomicros.com/avr/puertos/motores-paso-a-paso.html.
“output_devices” (stepper_motor ->unipolar)
4-Sensores de luz
5-Sensores de temperatura
6-codigo con factor de histéresis para evitar movimientos bruscos al llegar al umbral de temperatura o de luz definido.
assignment on progress:
plan and document a final project that integrates the range of units covered:
what will it do?
who’s done what beforehand?
what materials and components will be required?
where will they come from?
how much will it cost?
what parts and systems will be made?
what processes will be used?
what tasks need to be completed?
what questions need to be answered?
what is the schedule?
how will it be evaluated?
What will it do?
Materials, From where?, Cost?
Parts and Systems:
Motor paso a paso
http://es.wikipedia.org/wiki/Motor_paso_a_paso
http://academy.cba.mit.edu/classes/output_devices/index.html
http://en.wikipedia.org/wiki/Stepper_motor
Processes:
Tasks:
Questions?
Schedule:
Evaluate?


















































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}